械科技有限公司")
當(dāng)前位置:首頁
> 產(chǎn)品展示
> 電石料面處理機(jī)
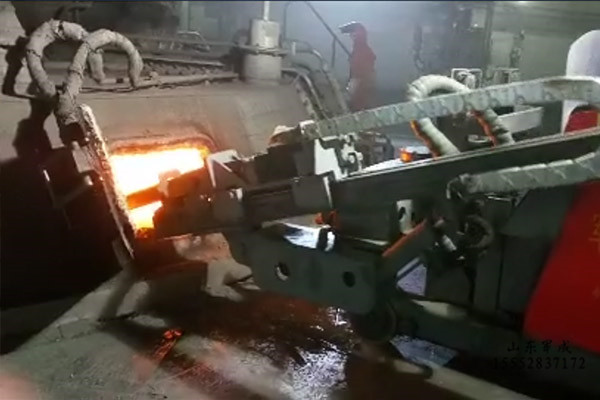
電石料面處理機(jī)

前輪與后輪裝配為三輪行走式,。前兩個(gè)為自動(dòng)輪,,各由一臺(tái)帶行星加速器的車輪油馬達(dá)驅(qū)動(dòng);后一個(gè)為主動(dòng)輪,起支承與轉(zhuǎn)向的感化,,轉(zhuǎn)向時(shí)經(jīng)由過程一個(gè)轉(zhuǎn)向油缸推拉偏幸機(jī)構(gòu)便可使車輪作程度擺動(dòng),。
任務(wù)機(jī)構(gòu)為一個(gè)帶操作臂的四連桿機(jī)構(gòu)。重要有3種功效:操作臂擺動(dòng),,由兩個(gè)擺動(dòng)油缸掌握,,用以調(diào)理操作臂的擺動(dòng)角度;操作臂前后伸縮,由一個(gè)伸臂油缸掌握,,以完成任務(wù)時(shí)將操作臂伸出,,不任務(wù)時(shí)將操作臂縮回的請(qǐng)求;推刮卸料,由一個(gè)帶導(dǎo)向套筒和刮削環(huán)的油缸掌握,,用以完成裝料箱卸料,。為防止因操作對(duì)象不測(cè)地與爐內(nèi)電極接觸而使機(jī)身帶電,,四連桿機(jī)構(gòu)與機(jī)架之間的各聯(lián)絡(luò)點(diǎn)均采用絕緣辦法。

相關(guān)標(biāo)簽:
搗爐機(jī)
相關(guān)新聞
- 2018-06-22搗爐機(jī)在大型鐵合金電爐的生產(chǎn)中已成了不可缺少的設(shè)備
- 2018-04-27搗爐機(jī)廠家提醒搗爐機(jī)開機(jī)前的準(zhǔn)備工作不能忽視
- 2017-10-21加料搗爐機(jī)的構(gòu)造及功用
- 2018-01-05搗爐機(jī)廠家簡(jiǎn)述搗爐機(jī)操作時(shí)的注意事項(xiàng)
- 2018-01-11廠家分析搗爐機(jī)的作業(yè)前應(yīng)做的準(zhǔn)備有哪些
- 2017-09-24搗爐機(jī)的電器控制系統(tǒng)是什么
- 2018-07-25關(guān)于搗爐機(jī)中DDS加料搗爐機(jī)的構(gòu)造及功用,?
- 2018-01-14搗爐機(jī)生產(chǎn)廠家明確主攻方向的幾點(diǎn)措施



產(chǎn)品中心Product Center
聯(lián)系我們
聯(lián)系人: 王經(jīng)理(經(jīng)理)
手 機(jī): 15552837172 、13953879721
電 話: 0538-3496888
郵 箱: [email protected]
Q Q: 290552405
網(wǎng) 址: mxier1314.com
地 址: 山東省肥城市潮泉鎮(zhèn)工業(yè)開發(fā)區(qū)